Hello,
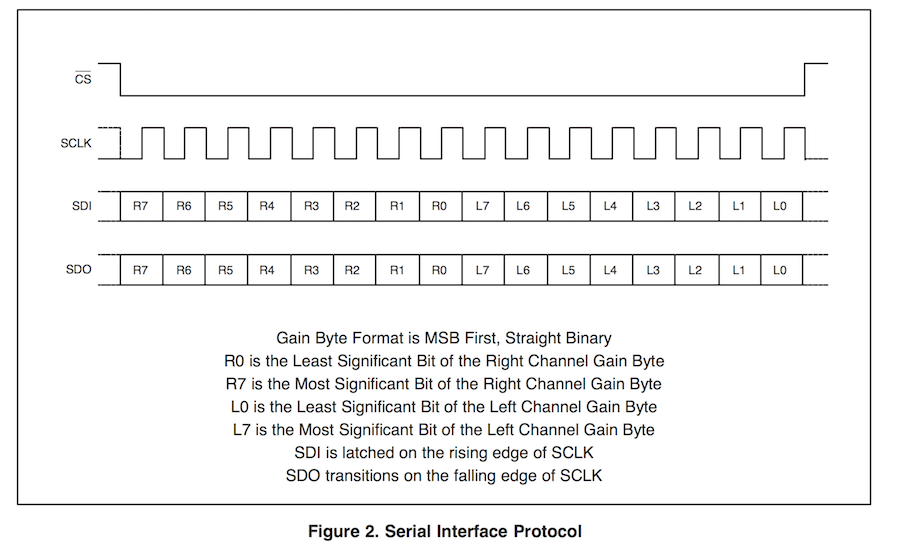
I've got a line level circuit, with an OPA134 feeding a PGA2320, then to a 1646 line driver. Using arduino to program the PGA2320 and I'm finding some odd behaviour. As I understand it, the Gain range should correlate to bytes from 0-255. I don't want to add gain, so my max is 192 (unity). 192 works just fine, but as I attenuate, it bottoms out at 165, measuring about 45dB below unity. When I go below 165, it immediately jumps up to about 25dB below unity and stays at that level all the way down to N=0. Another way of putting it is that from N=0 to N=163 I get about -25dB, then at 165 level drop another 20dB and begins to increment normally.
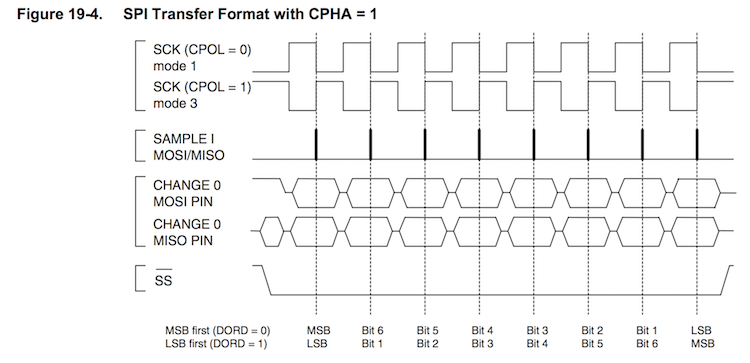
I'm transmitting SPI at 4Mhz, MSB, SPIMODE3. In other respects it seems to respond fine to programming and sounds good, but I'm just stuck with the limited attenuation range. Any thoughts would be much appreciated.
I've got a line level circuit, with an OPA134 feeding a PGA2320, then to a 1646 line driver. Using arduino to program the PGA2320 and I'm finding some odd behaviour. As I understand it, the Gain range should correlate to bytes from 0-255. I don't want to add gain, so my max is 192 (unity). 192 works just fine, but as I attenuate, it bottoms out at 165, measuring about 45dB below unity. When I go below 165, it immediately jumps up to about 25dB below unity and stays at that level all the way down to N=0. Another way of putting it is that from N=0 to N=163 I get about -25dB, then at 165 level drop another 20dB and begins to increment normally.
I'm transmitting SPI at 4Mhz, MSB, SPIMODE3. In other respects it seems to respond fine to programming and sounds good, but I'm just stuck with the limited attenuation range. Any thoughts would be much appreciated.